Sewon Kim

Embodied System, Optimal Control, and Robot Learning.
This is Sewon Kim. I'm an undergraduate student in electrical and computer engineering based at the Unitversity of Seoul. I've been focusing on optimal control and robot learning. I enjoy bringing sophisticated theories into the real world but strive to maintain a sense of balance between theory and implementation.
By the way, I'm 24 years old and originally from Seoul, South Korea 🇰🇷. I have a passion for jazz and heavy metal, and I spent many years playing acoustic and electric guitar in rock bands 🎸.
Projects
[08/25/2025-09/25/2025] Self-Driving Air Purifing Agent
[03/01/2024-12/19/2024] F1tenth Autonomous Racing
F1Tenth refers to a 1/10-scale car of a real Formula 1 vehicle, which aims to achieve high-speed and collision-free autonomous driving. We built a full-stack autonomous navigation system for racing completely from scratch, and I led the project with two undergraduate students.
[07/25/2024–09/27/2024] Cart Pole System Design and Control with NMPC and PID
I built a physical Cart-Pole system, a classical control problem, for just 272 USD and applied nonlinear model predictive control. I independently developed 3D modeling, sensor integration, motor control, state estimation, embeded, and MPC.
[01/05/2024-01/11/2025] InBody AI Scale
[09/01/2023-12/23/2023 | 03/01/2024-06/18/2924] Experiment Courses
[07/01/2023-07/31/2023] ECG-Based Cardiovascular Diagnosis Device Using ML
[07/24/2023-07/28/2023] Autonomous Mobile Robot for Executing Missions
[03/07/2022-01/31/2023] Dating App "Sidaeting"
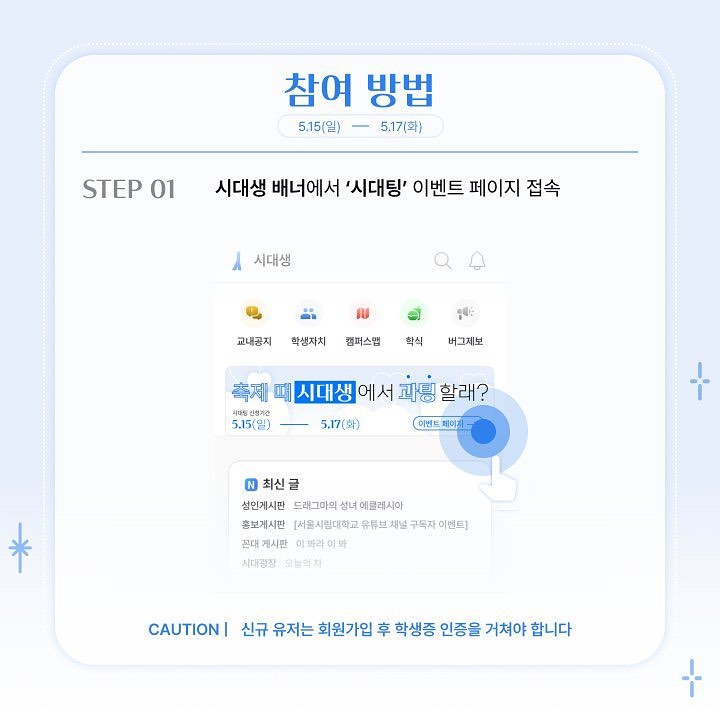

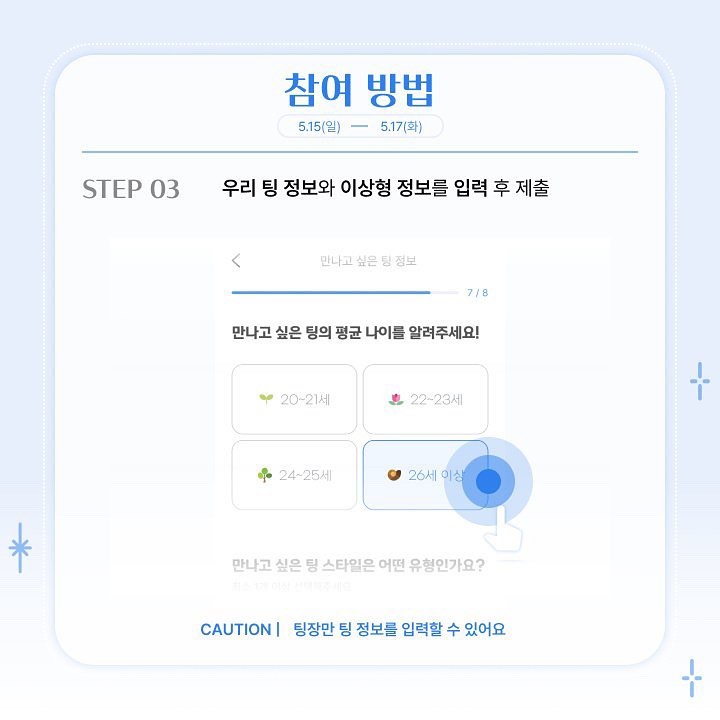
Our team, UOSLIFE, launched the dating service “Sidaeting,” serving 1,700 users. I developed the app’s frontend.