Sewon Kim

Optimal Control and Reinfocement Learning
This is Sewon Kim. I'm an undergraduate student in electrical and computer engineering based at the University of Seoul. I am interested in developing scalable learning and control methods and their theoretical foundations for autonomous agents, such as robotics.
By the way, I'm originally from Seoul, South Korea 🇰🇷. I have a passion for jazz and heavy metal, and I spent many years playing acoustic and electric guitar in rock bands 🎸.
Publications
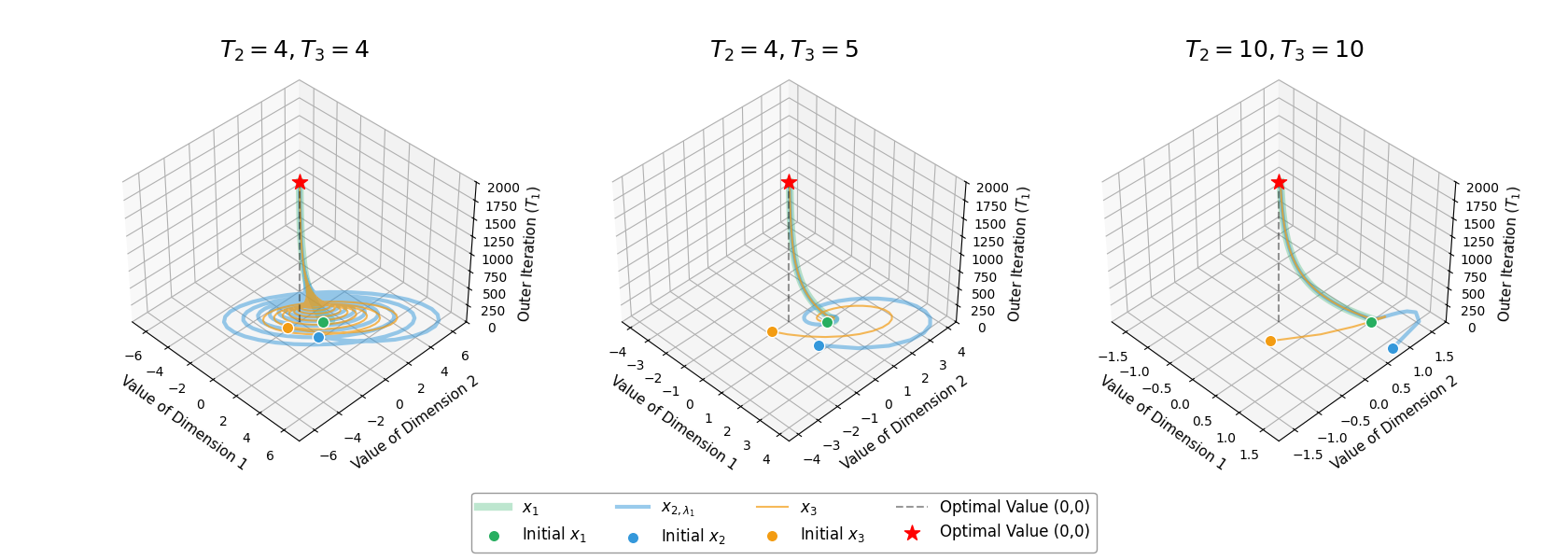
First-Order Methods for Trilevel Optimization
Projects
[11/27/2025-01/21/2026] Autonomous Planetary Gearbox Assembly (by Galaxea R1)
[08/25/2025-09/25/2025] Autonomous Air Purifing Agent
I independently implemented full-stack autonomous air purifying agent in NumPy from scratch, covering MCL, MPPI, and TSP.
[03/01/2024-12/19/2024] Autonomous Racing F1tenth
F1Tenth refers to a 1/10-scale car of a real Formula 1 vehicle, which aims to achieve high-speed and collision-free autonomous driving. We built a full-stack autonomous navigation system for racing completely from scratch, especially MPPI, and I led the project with two undergraduate students.
[07/25/2024–09/27/2024] Cart Pole System Design and Control with NMPC and PID
I built a physical Cart-Pole system, a classical control problem, for just 272 USD and applied nonlinear model predictive control. I independently developed 3D modeling, sensor integration, motor control, state estimation, embeded, and MPC.
[01/05/2024-01/11/2025] InBody AI Scale
[09/01/2023-12/23/2023 | 03/01/2024-06/18/2924] Experiment Courses
[07/01/2023-07/31/2023] ECG-Based Cardiovascular Diagnosis Device Using ML
[07/24/2023-07/28/2023] Autonomous Mission Mobile Robot
[03/07/2022-01/31/2023] Sidaeting
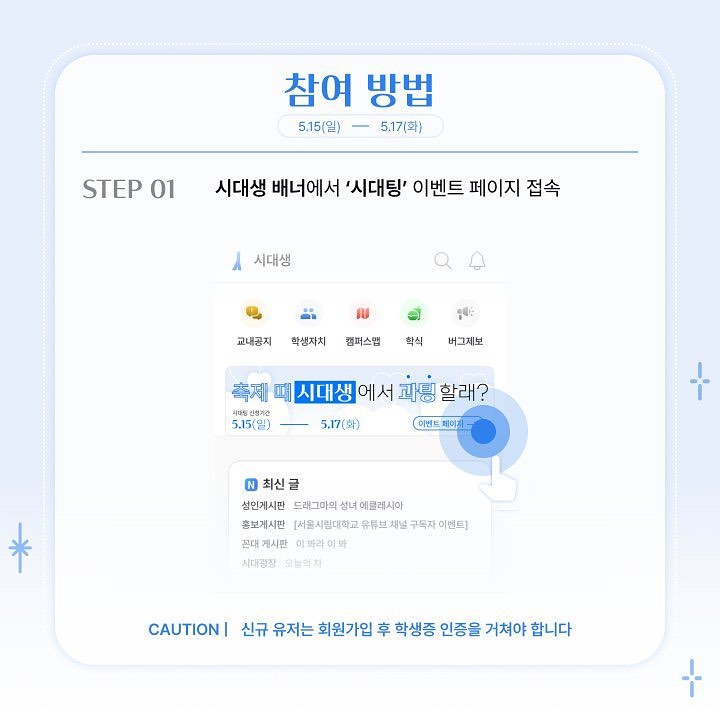

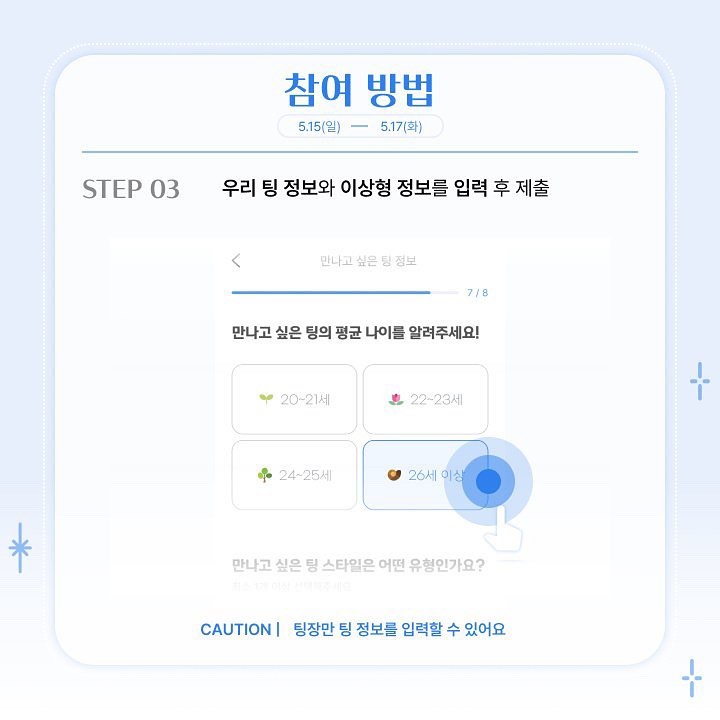
Our team, UOSLIFE, launched the dating service “Sidaeting,” serving 1,700 users. I developed the app’s frontend.