[AI] Solving Problems by Searching
We will cover several shearch algorithms.
We consider only the simplest environments: episodic, single agent, fully observaable, deterministic, static, discrete, and known.
- Informed algorithms: the agent can estimate how far it is from the goal
- Uninformed algorithm: no such estimate is available
1. Problem-Solving Agents
Search Problem Formulation
- State space: a set of possible states that the environment can be in
- Initial state: a state that the agent starts in
- Goal state: Given a state $s$, ACTIONS($s$) returns a finite set of actions that cab ev excuted in $s$
- Transition model: describing what each action does. RESULT(s, a) returns the state that results from doing action $a$ in the state $s$.
- Action cost function: ACTION-COST($s, a, s’$) gives the numeric cost of applying action a in state s to reach state $s’$.
- Path: a sequence of actions
- Solution: a path from the initial state to a goal state
- Optimal Solution: the lowest path among all solutions
The state space can be represented as a graph in which the verices are states and the directed edges between them are actions.
- Model : a abstract mathematical description
- Abstraction : the process of removing detail from a representation
The abstraction is useful if carrying out each of the actions in the solution is easier than the original problem.
The choice of a good abstraction thus involves removing as much detail as possible while retaining validity and ensuring that the abstract actions are easy to carry out.
2. Example Problems
3. Search Algorithms
3.4 Measuring problem solving performance
We can evaluate an algorithm’s performance in 4 ways:
- Completeness: Is the algorithm guaranteed to find a solution when there is one, and to correctly report failure when there is not?
- Cost Optimality: Does it find a solution with the lowest path cost of all solutions?
- Time complexity: How long does it take to find a solution? This can be measured in seconds, or more abstractly by the number of states and actions considered. / number of nodes expanded
- Space complexity: How much memory is needed to perform the search? / maximum number of nodes in memory
4. Uninformed Search Strategies
Uninformed search algorithm: is given no clue about how close a state is to the goal
4.1 Beadth-first search
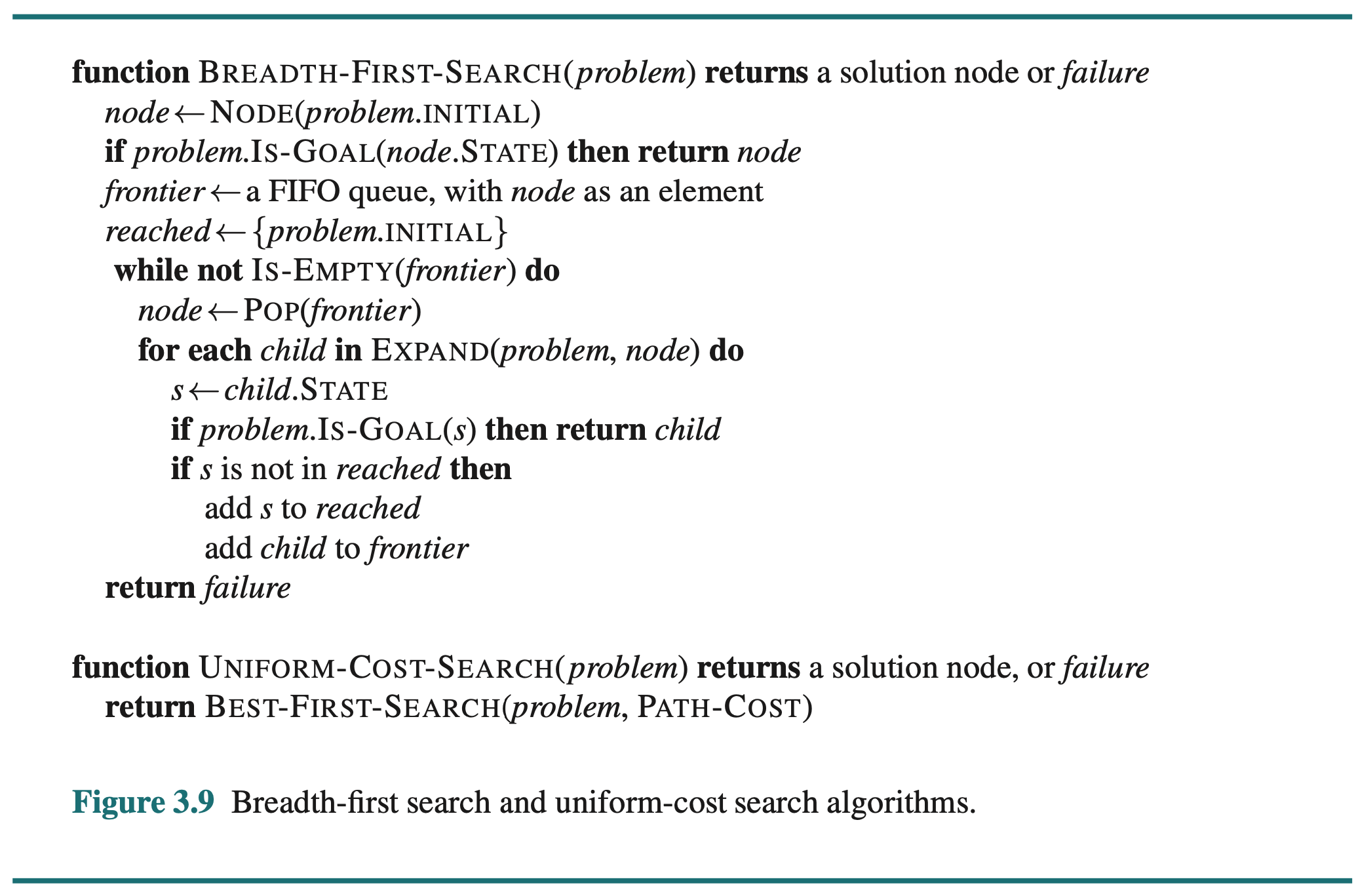
Breath-first search always finds a solution with a minimal number of actions, because when it is generating nodes at depth $d$, it has already generated all the nodes at depth $d - 1$
- It is cost-optimal for problems where all actions have the same cost, but not for problems that don’t have that property.
- It is complete in either case.
Suppose searching a uniform tree where every state has b successors. The root of the search tree generate b nodes, each of which generates b more nodes, for a totoal of $b^2$ at the secode level. Now suppose that the solution is at depth $d$.
Then the total number of nodes generated is
\[1 + b + b^2 + b^3 + \dots + b^d = \mathcal{O}(b^d)\]All the nodes remain in memory, so both time and space complexity are $\mathcal{O}(b^d)$.
In general, exponential-complexity search problems cannot be solved by uninformed search for any byt the smallest instances.
4.3 Depth-first search and the problem of memory
5. Informed (Heuristic) Search Strategies
6. Heuristic Functions
Reference
Artificial Intelligence: A Modern Approach Fourth Edition