[Optimal Control] Research Material
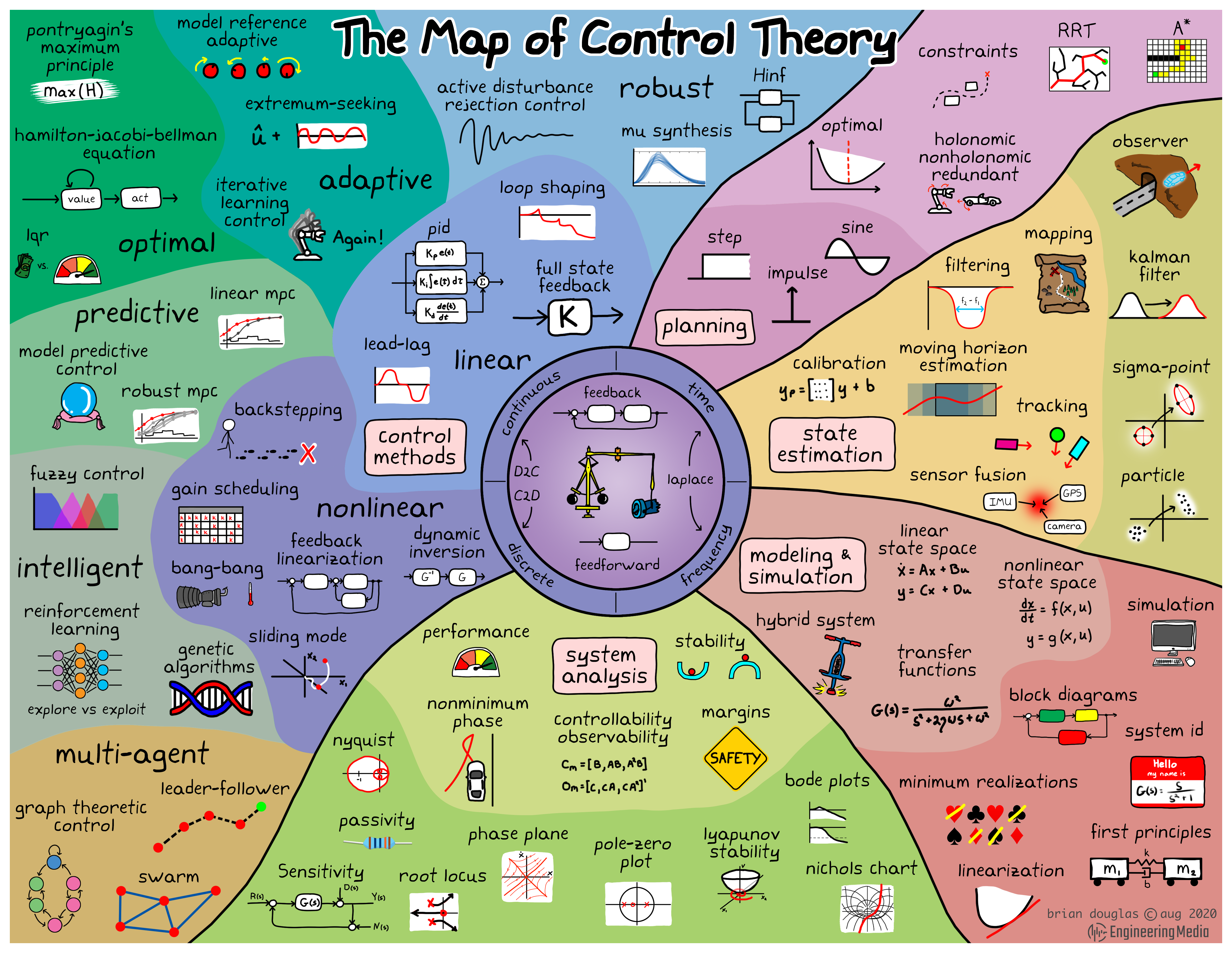
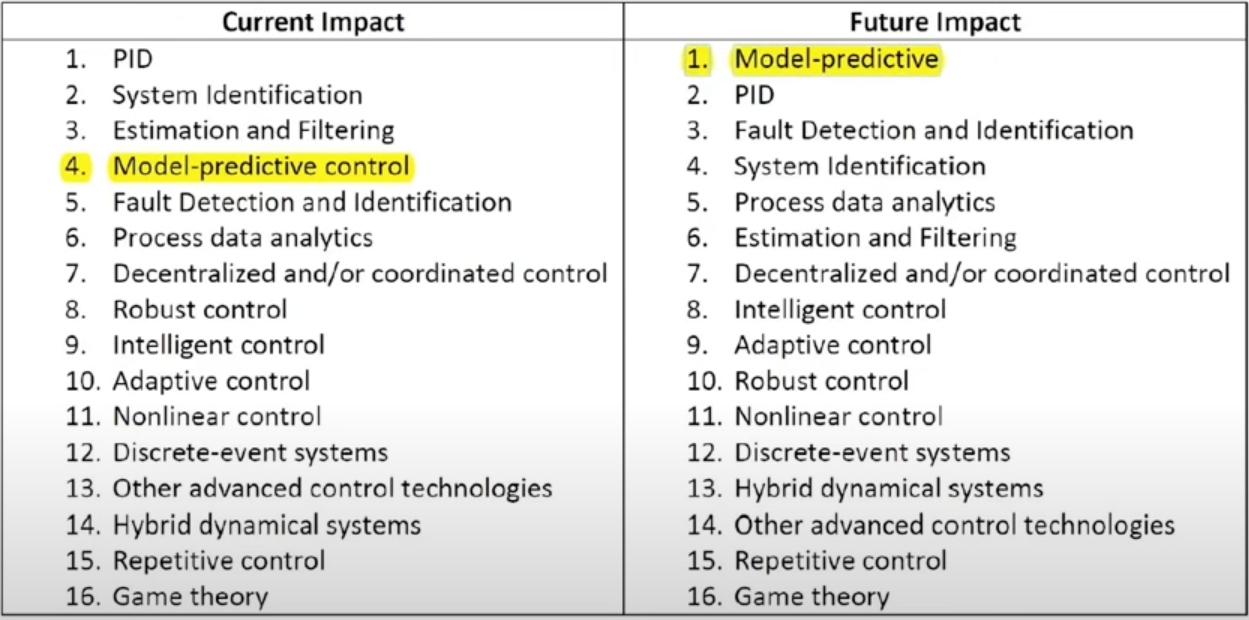
Control technology
History of MPC
| Years | Application | MPC |
|---|---|---|
| 1970-2000 | Process control | Linear MPC |
| 2001-2010 | Automotive control | Explicit, hybrid MPC |
| 2005 | Aerospace systems and UAVs | Linear time-varying MPC |
| 2005 | Infomation and communication Technologies (wireless nets, cloud) | Distributed/decentralized MPC |
| 2010 | Energy, finance, automotive, water | Stochastic MPC |
| 2010 | Industrial production | Embedded optimization solvers for MPC |
| today | Machine Learning | Data-driven MPC |
Introduction Video
- [메릭 웨비나] 모델예측제어 기법(Model Predictive Control) 및 응용사례 소개 - 한경석 교수(경북대학교 기계공학부)
- MPC from Basics to Learning-based Design
- Data-driven MPC: From linear to nonlinear systems with guarantees
- Model Predictive Optimized Path Integral Strategies - ICRA Video
- LTC21 Tutorial MPPI
Researcher
- MPC의 대가 : Frank Allgöwer
- Professor of Aerospace Engineering, Univeristy of Michigan Ilya Kolmanovsky
- Associate Professor of Mechanical Engineering, Kyungpook National University Kyoungseok Han, Lab Web Site
궁금한 점
- MPC는 input과 model을 기반으로 현 시점부터 미래의 특정 시점까지의 control input sequence를 만든다. 그리고 현 시전의 값만을 취하고 나머지는 버린다. 어짜피 버릴 거면, 왜 미래 시점까지의 제어 입력을 만드는 것일까? 미래 목표에 해당하는 현재 목표를 세우기 위함일까?
- 기존의 controller는 MIMO system을 어떻게 다룰까?
- 기존의 controller는 과거만을 바라본다면 MPC는 미래만을 바라본다고 할 수 있을까?
- MPC의 feedback은 일반적인 의미의 feedback과 동일할까?
- [박경훈 교수님께 질문] 제어의 각 분야에 대한 설명
- Sampling time or horizon을 왜 일정하게 하려고 노력할까? v
- GPU 가속을 어떻게 할 수 있을까? v
My Interest
- Stochastic MPC : MPPI
- Data-Driven MPC
- Model-Based RL
MPPI
https://sites.gatech.edu/acds/mppi/
http://dyros.snu.ac.kr/the-people-of-dyros-new/
https://untitledtblog.tistory.com/133
https://github.com/sisl/MPOPIS