[Paper Review] Feature Matching: SuperGlue and LightGlue
SuperGlue
SuperGlue: a neural network that maches two sets of local features by jointly finding correspondences and rejecting non-matchable points.
- a linear assignment problem, which, when relaxed to an optimal transport problem, can be solved differentiably (classical graph-based strategy of matching)
- The cost function of this optimization is predicted by a GNN.
SuperGlue in context of SLAM
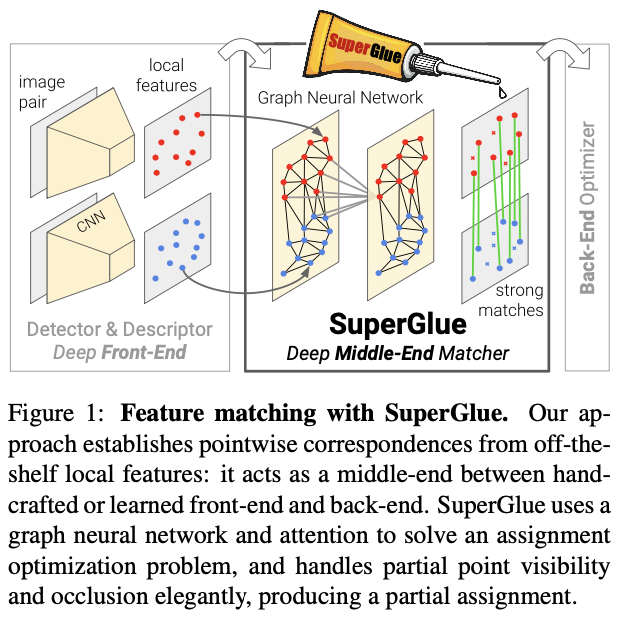
- [front-end] visual feature extraction
- [middle-end] feature matching (SuperGlue)
- [back-end] bundle adjustment or pose estimation
SuperGlue Architecture
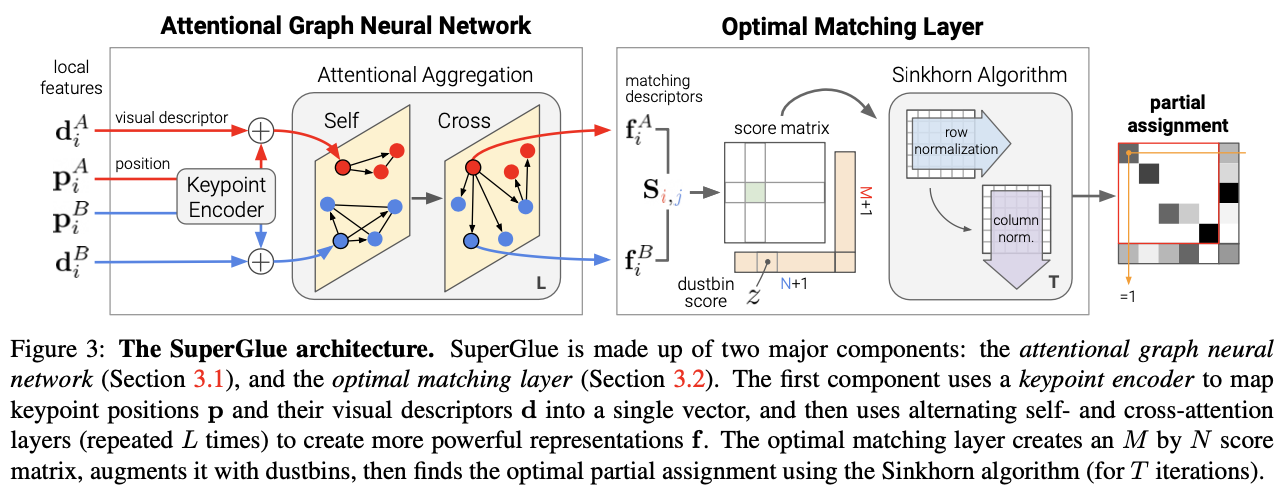
Image has $\mathbf{p}$ and $\mathbf{d}$
- $\mathbf{p}$ : a set of keypoint positions
- $c$ : detection confidence
- $\mathbf{p}_i := (x, y, c)_i$ : position
- $\mathbf{d}$ : associated visual descriptors
- $(\mathbf{p}, \mathbf{d})$ : local features
We suppose visual descriptor $\mathbf{d}_i \in \mathbb{R}^D$ already was extracted by a CNN lke SuperPoint. Image $A$ and $B$ have M and N local features, indexed by respectively
$\mathcal{A} := [1, \dots, M], \;\;\; \mathcal{B} := [1, \dots, N]$
재밌는 점
- Visual Slam에 대한 강력한 단서를 제공한다. (with SuperPoint)
Reference
- SuperGlue: Learning Feature Matching with Graph Neural Networks (CVPR’20 Oral)
- LightGlue: Local Feature Matching at Light Speed (ICCV’23)
Memo
Regularities of the world in the image matching problem
- 3D world is largely smooth and sometimes planar
- all correspondences for a given image pair derive from a single epipolar transform if the scence is static
- some poses are more likely than others
2D keypoints are usually projecttions of salient 3D points, like corners or blobs, thus correspondences across images mush adhere to certain physical constraints
- a keypoint can have at most a single correspondence in the other image
- some kypoints will be unmatched due to occlusion and failure of the detection