[ROS2] ROS Concepts
Workspace
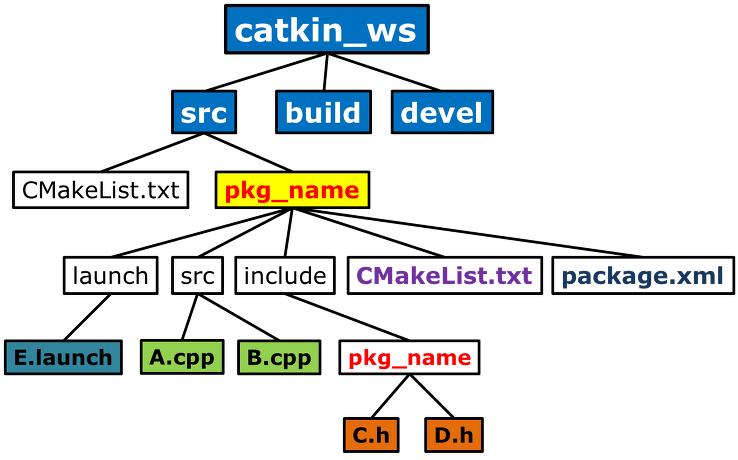
my_ros2_workspace/
├── build/
│ └── (build artifacts)
├── install/
│ └── (installed files)
├── log/
│ └── (log files)
└── src/
├── my_package_1/
│ ├── CMakeLists.txt
│ ├── package.xml
│ └── src/
│ └── (source files)
└── my_package_2/
├── CMakeLists.txt
├── package.xml
└── src/
└── (source files)
- [workspace_name]/src : package들이 들어간다.
ROS2에서는 패키지가 워크스페이스 내의 src 디렉토리 하위에 여러 계층의 디렉토리 구조를 가질 수 있습니다. colcon 빌드 도구는 하위 디렉토리 내에 있는 패키지를 모두 탐색하여 빌드할 수 있습니다. 따라서 workspace_name/src/repository/pathplanning/pid_planning와 같은 경로에 패키지가 위치해도 문제 없습니다.
중요한 점은 package.xml과 CMakeLists.txt 파일이 패키지의 루트 디렉토리에 있어야 한다는 것입니다. pid_planning 디렉토리 안에 이 두 파일이 있어야 합니다.
Packages
- 관련된 코드, 데이터, 라이브러리, 설정 파일 등을 하나의 단위로 묶은 것
- 패키지는 기능적으로 관련된 코드를 모듈화하고, 쉽게 재사용하고 배포할 수 있도록 한다.
구조
- src/ : source code directory
- launch/ : launch file directory
- msg/ : message file directory
- srv/ : service file directory
- CMakeLists.txt : 프로젝트의 빌드 프로세스를 정의하는 스크립트. 프로젝트 설정, 소스 및 헤더 파일 관리, 라이브러리 및 실행 파일 생성, 의존성 관리, 설치 지시사항 등을 포함하여 프로젝트를 컴파일하고 링크하는 데 필요한 모든 정보를 제공한다. 다양한 플랫폼과 컴파일러에서 일관된 빌드 환경을 제공한다.
- package.xml : build와 dependency 관리를 위한 파일
CMakeLists.txt
역할
- 프로젝트 정의 : 프로젝트의 이름 버전, 최소 CMake 버전 등을 정의한다.
- 패키지 찾기 : 프로젝트에서 필요한 외부 라이브러리와 패키지를 찾고, 해당 패키지의 위치와 관련 정보를 설정한다.
- 소스 파일 및 헤더 파일 설정 : 프로젝트의 소스 파일과 헤더 파일을 설정하고 이들을 컴파일하여 최종 실행 파일이나 라이브러리를 생성한다.
- 라이브러리 및 실행 파일 생성
- 설치 지시 사항
- 테스트 및 빌드 옵션 설정
- 패키지 의존성 관리
- 조건부 컴파일
- 다양한 CMake 매크로 및 함수 사용
- 디렉토리 및 서브 디렉토리 관리
Node
Launch File
- ROS에서 시스템의 여러 노드를 한꺼번에 실행하고 관리하기 위해 사용되는 XML 형식의 설정 파일